Programme du laboratoire commun
Le LabCom IRISER vise à proposer, à maîtriser de bout en bout le comportement et les performances des systèmes intelligents voire embarqués destinés à la vision artificielle pour l’analyse rapide et automatisée des images/vidéos (de très grandes tailles, multispectrales géoréférencées de hautes résolutions) capturées à bord des aéronefs de COSE en s’appuyant sur des stratégies de traitement de l’information visuelle et d’apprentissage automatique.
Les travaux envisagés s’articulent autour de cinq axes principaux à savoir :
Axe 1 : La détection d’objets sur les images de très grandes tailles.
Il s’agira d’améliorer les pistes de recherche déjà explorées et de développer des outils essentiels à la recherche mais aussi pour le déploiement et l’intégration des solutions développées au sein du système CAMELEON de COSE.
Des connaissances sur le déploiement de solutions similaires sont indispensables pour le passage de l’état de prototype à une application réelle.
En parallèle, une activité de veille permettra de rester au fait des nouvelles avancées théoriques et technologiques dans le domaine de la détection d’objets.

Axe 2 : La classification d’objets.
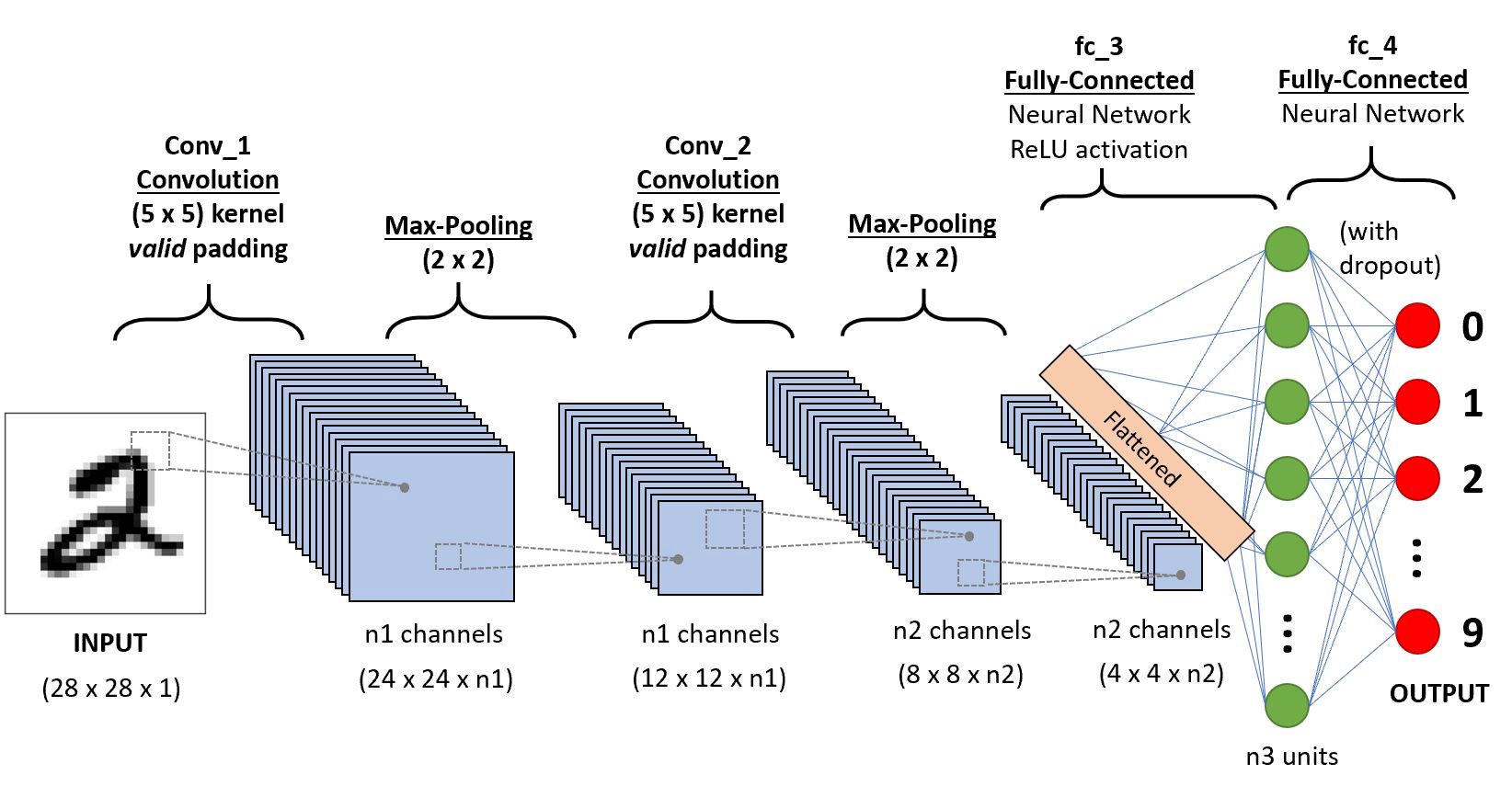
Les solutions existantes aujourd’hui atteignent déjà des performances élevées. Les travaux porteront principalement sur l’utilisation optimale des architectures CNN afin de permettre un apprentissage avec relativement peu d’échantillons.
Il s’agit d’un point important, car face à certaines utilisations, la génération d’une base de données pour une classe spécifique peut être difficile et demander un temps trop long pour un utilisateur souhaitant intégrer une nouvelle classe.
Axe 3 : Le suivi d’objet dynamique et la prédiction de trajectoire dans des flux (réels) d’images satellites.
En plus, il sera nécessaire de développer des métriques d'évaluation de suivi pour pouvoir comparer les performances des différentes implémentations.

Axe 4 : L’apprentissage et la reconnaissance autonome.
Il s'agira de proposer un modèle de reconnaissance modulaire interprétable qui pourra être ajusté par des analystes ayant une connaissance du domaine. Néanmoins, on aimerait que ceux-ci interviennent seulement sur des paramètres interprétables.
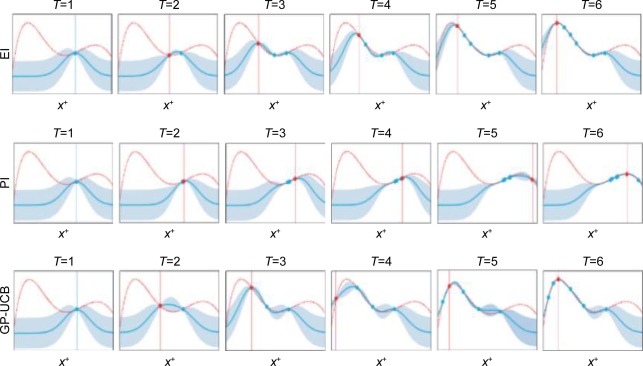
Pour cette raison, nous souhaitons automatiser la sélection de variables et d’hyperparamètres. La piste privilégiée est celle de l’optimisation bayésienne, car elle permet l’exploration d’espaces continus, en contraste avec la recherche sur grille, et tolère le bruit dans les évaluations de la fonction objective.
Néanmoins, les implémentations actuelles fonctionnent correctement lorsque la dimension de l’espace des paramètres est inférieure à 20.
Nous souhaitons donc pouvoir faire passer à l’échelle ce type d’algorithmes afin de pouvoir les appliquer à des tâches plus conséquentes.
Axe 5 : L’optimisation des algorithmes
L’optimisation des algorithmes proposés afin d’être exécutés en temps réel ou léger différé sur des systèmes embarqués en prenant avantage de composants de calculs spécifiques disponibles et de la parallélisation que peuvent offrir des puces comme la Tegra Xavier de Nvidia.